最近読んだ本で、読んだ後に行動に結びついた本
いらないものをとことん捨てる「捨」
今いるかいらないかを突き詰めることにより
物を通じて自己を見直すことになる
物をとことんまで削って必要なものだけにした後は
物が入ってくることを断つまたは、吟味して良いものだけを入れて
入れ替わりに古いものを捨てる、これが「断」
そして、物欲や執着から離れる「離」
これら三つで「断捨離(だんしゃり)」
である
読んだ後に、部屋を片付け始め、ゴミが入ったごみ袋を
たくさん作りました。
昨日で40歳になりました。
早いものです
40歳前半の目標は
1 学位取得
2 家庭を持つ
3 仕事の充実
1は来年から社会人大学院に入学予定です
2はいい人がいたらご紹介願います(笑)
3はもう少し具体的に考えてはあるんですが
ここではこれだけ書いておきます。
今年の誕生日は卒研の学生からタイピンとカフスをいただきました
嬉しかったですね。
つくばチャレンジ第一回合同実験会
今回は学生も含めて前日移動
速めにホテルについたが
ロボが届いていない・・・・・
GPSを持って下見に意向と思っていたのに
残念
19:30ぐらいにならないと届かない模様
失敗したなあ
まあ、今日は非常に暑いので日中の作業は
つらいし、移動で疲れているから
夜間作業のほうがいいかなあ
最初から出来ない子はいないのではないか?
「できない」ではなく、「やらない」「やらなかった」のではないか?
どうしたら「やる」のスイッチを入れることができるのか
それを探すことが自分の使命のような気がする今日この頃です。
おはようございます
(朝以外にこれを見た人はこんにちは)
今日は朝5時に目が覚めてしまった。いろいろ気になることがあり、夜も眠れないということか(苦笑)
そこで、まずは洗濯機を起動して、ワイシャツなどを洗濯。
洗濯機に洗濯をしてもらっている最中に、庭の草むしり。
庭といっても、たたみ一畳のスペースだがほっとくと大変なことになる。
すでに大変なことになってましたが、やっときれいになりました。
さて、今日は大変良いお天気です。
これからスタバに行って朝食をとり、床屋に行こうかと思ってます。
そのあとは職場でロボでもいじろうかなあ。
梅雨明けでしょうか
非常に暑いよい天気でした。
一応実験走行に向けた最終準備段階に入った感じになりました。
学内試走と今日は運搬用の箱作りをしました。
これだけ炎天下になると
PCが熱暴走してしまい大変でした。日よけを作ってからは
大丈夫になりましたが。暑さ対策は必要ですね。
例年だとこの時期屋外で自律走行はしてなかったので
今年はいろいろ初体験がありそうです。
今年のコンセプトはまずはうさぎさんに戻ることです。
WPに達したらいったん停止し、方向を次のWPにむけなおしてから
再スタートします。
誘導は目の前にぶら下げた人参を追いかける感じのものに変えています。
比例航法の欠点だった、距離によって航法定数(誘導ゲイン)を変えてやらないと
いけないのを解決するために
今年は常に同じ距離になる目標にむけて誘導することにしました。
目標点も回避プログラムが作り出した、WPを意識した目標点にむけて
誘導されるので、センサーベースナビゲーションにどちらかといえば近い
WPナビゲーションになる予定です。(何の事だか分りませんねこの説明・・・)
今日は午前中の試走の後、学生がアイスを買ってきてくれて嬉しかったなあ
回避プログラムと誘導プログラムをリンクしました。
外は雨が降っているのでGPSが使えない状態で
オドメトリ走行です。
最後のほうはオドメトリの誤差が大きくて
WPの切り替えがうまくいかなくなっています。
今日は0.2秒おきに更新されるオドメトリを用いた
目標点への誘導実験を行った。
距離的に短いので、うまく自己位置を推定できている。
航法定数を小さくしているため、目標点へ向かう曲線が緩慢なのが解る。
今日は雨だったが、明日晴れたら長距離走行をさせて見る。
今日は角度もエンコーダーから取りましたが、明後日ぐらいには
ジャイロでやりたい。
●オドメトリ
一定周期Tの間はロボットは直線走行していると仮定して、Tの間の走行距離をL
走行した方向をθ(n)としたとき現在位置X(n),Y(n)は以下の様に計算できます
X(n) = L cos(θ(n)) + X(n-1);
Y(n) = L sin(θ(n)) + Y(n-1);
これをオドメトリと言います。デッドレコニングの一種です
Lは一般的には左右の駆動輪に接続されているエンコーダーの値の平均をとって求めます。
角度は最初の値を0としたエンコーダの値の積算値の左右の差分で求めたり、ジャイロを用いて
求めます。
この方法は誤差も積算されるので、何らかの手段で誤差をリセットする必要があります。
本日のおかずはハンバーグと焼きそば
ハンバーグはお弁当用に小さく作ってあります。
5月から毎日の買い物レシートをノートに貼り付けている。
とりあえず三日坊主にならずに続いてます。
支払いに合わせて給料明細もはる。
いままで散逸していたのが整理できて中々気持ちがよい。
はやりのライフハック系の言葉を使えばライフログの一つでしょう。
先日、毎年来る税額の決定に関する紙を貼り付けた。
たまたま手じかに昨年のもあったので、それも同じページに貼ってみた。
そして両者を見比べると・・・
給与所得の欄が今年のほうが16万円ほど少ないことが発覚!
がーーーーん
記録をとることは問題を明らかにして対策を練るのに有効です。
しかし、この場合はどうしたものかねえ。
一生懸命に働いてるんだけどねえ。
まずまず
7月の31日で40歳になります。
20ぐらいの頃はまさか40まで独身だとはおもわなんだなあ
まあ、ミサイルぶっ放しに行く試験で1カ月近く家を空けたり
それに引き続きマウス作るのに彼女に全然会わなかったり
職場から帰るのが毎日10時だったり、泊まったりしてたら
そうなるよね。でもそれが楽しいだからしょうがない。
今日は外にテント張って実験をしました。
うちの研究室にテントがあることを学生が初めて知ったらしく
楽しそうにテント張ってました。
夏休み前日の8日に「今日が前半の山」と檄をとばし、できるまで
やると宣言しました。結果的には4時まで頑張りましたが、まあ
うまくは行きませんでした。
学生もいろいろ学べたかなと思います。徹夜するとどうなるかとかね。
気持ち的には学生にはまだまだ負ける気はしませんが。
そろそろ夜はきつくなってきました。
今回の夜間作業で全体像が見えてきて、今までのプログラムの構造では
複雑だということが理解できたみたいで、昨日、今日と、作り直し作業に
入っています。テント作業は研究室と試走の間の時間短縮のためです。
現在の進捗は3年前の12月、2年前、昨年の10月・11月といったところです。
もう少しすると、少しは学生と本質的なところで議論できるかなと楽しみにしてます。
30の時にランサーでいい結果を残せたので、40の時も
なにかいい結果を残したいなあ。
でも教育するのは我慢です。答えを簡単に教えてはいけないのです。
ほんとは教えて、その先のもっと難しく面白いところに進みたいんだけど
それじゃ基礎をすっとばしてしまうので我慢我慢
緯度
経度
現地ではネットにつなげないので難しいが
オンラインのPC上で移動経路を取得できないかと
GoogleMap APIにチャレンジ中
●材料購入
有限会社サンライト
●ガラスマット
ガラス繊維を無方向に編んである。型の形になじみやすい。
♯300 1×5m ¥3150
●ガラスクロス
縦横に編みあげられている。引っ張り強度あり
♯150 1×5m ¥4725
●サフェースバリアマット
#30の非常にうすいガラスマット。仕上げに表面にはりガラスマットの繊維を目立たなくする
●♯300
クロスやマットについている番号♯300は1㎡あたり300gという意味
●樹脂
エアロカーレジン、スチロール用レジン、型用、製品用とがある。型の発砲スチロールやスタイロフォームはスチロール用でなくては溶ける。スチロール用はエアロカーレジンより高い。
エアロカーレジン 4kg ¥5775
スチロール用 4kg ¥10,500円
ちなみに「うさぎさん」や「ねずみさん」(当研究室のつくばチャレンジ参加ロボットの愛称)を作るのに最低4kg要りました。
●ゲルコート
表面仕上げ用の樹脂。あるていど粘性があり凹凸を隠してくれる。
●インパラ・ノンパラ
樹脂やゲルコートにはインパラ・ノンパラの違いあり。パラはパラフィン(蝋成分)のことでインパラはパラフィン入りノンパラはパラフィンが入っていない。仕上がりの違いはインパラは乾くと表面はサラサラになるが、ノンパラは空気に触れている表面はいつまでも乾かずべたべたしている。ノンパラもこの上に積層していくと空気と遮断されるために固まることになる。
空気に触れて乾かす場合はインパラ製品を使用しなければならない。
●型用素材
発砲スチロール、スタイロフォームなど。当研究室ではうさぎさんはスタイロフォーム、ネズミさんは新聞の張りぼてで型を作りました。スタイロフォームは削りやすく扱いやすい。張りぼて方式はオリジナル発想ですが。うまくやればいい感じだと思っていますが。まだまだ工夫の余地がありそう。
別件で硬質発泡スチロールを加工しましたが、ゴミと服にまとわりつく塵が出て大変で使いたくありません。
●スタイロフォーム加工
スタイロフォームの板を重ねてスチのり(スチレン用のり)で張り合わせて。スライダックに接続したニクロム線電熱線で概略カットしていきます。あとは目の粗い紙やすり、布やすりで微調整していきます。ニクロム線に通電するときは、スライダックを最低電圧にセットして、徐々に電圧を上げてください。ほんのちょっとの電圧で大丈夫なはずです。間違うと、ニクロム線がすぐに赤熱して怪我や事故になります。
加工するときは電気式のサンダーがあると便利です。
●スタイロフォームコーティング
以前は木工用ボンド使用。今年はスチロール用樹脂を買って、表面に塗ってから、安いふつうの樹脂でガラス繊維の積層をしてみようと思います。
●電気式ダンサー
型の成型や製品の表面磨きに威力を発揮するのでぜひ欲しい機材。
●積層
ガラスマットを積層して、ガラスクロスと交互にやります。3層積層すれば十分な気がしてます。
●オス型・メス型
正式には原型にかぶせたFRPが製品のメス型になり。メス型の内側に積層していったFRPが製品になります。当研究室では毎年メス型を製品として使ってます。
●ディスクグラインダー
砥石のお皿が電気でまわる工具。FRPを切断して成型するための必需品。
●2010年の方針
型を抜かない。スタイロフォームそのまま入れておきます。表面を薄いFRPで覆ってスタイロフォームの補強と表面のつるつる感を出そうと思っています。
本日の夕食は野菜たっぷり焼きそばでした。
お酒の肴が
何もなかったので
焼いてみました。
OpenTKを活用してGUIも作成中
障害物回避のデバグに威力絶大です。
測域センサーの前に障害をおいて、走行可能方向の算出実験。
今日はショッキングな事件があり少し落ち込んでます。
慣れは恐ろしい。
やるべきこと、言うべきことをきっちり言わないとなと思いました。
詳細はある程度落ち着いたときに書きます。
住友精密工業から新しいジャイロを買いました。
100mぐらい走ってユーターンして帰ってきたら
誤差が8度ぐらいでました。
まあ、こんなもんかな
今日の夕食は親子丼
うっかり玉子入れてからにすぎてしまって
完全に固めてしまいました
ちょっぴり残念
学生たちが作っていた
東工大のホームページを参考にしたホバークラフトの試作品がうまく浮かびました。
マブチの280モータ30個と厚紙で作った遠心ファンで80kgは浮かせられます。
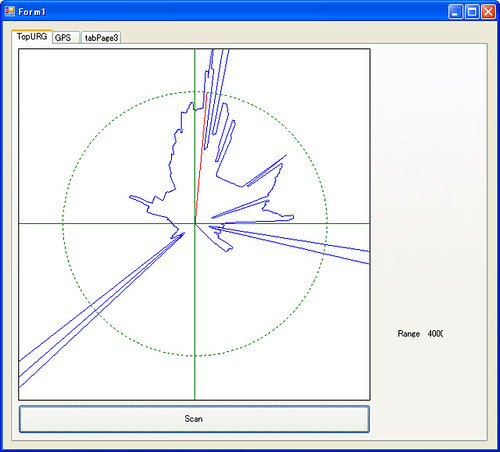
今年のつくばチャレンジは自動ドアの前で止まる必要がある
自動ドアはたぶんガラス戸だと思うので測域センサーで
ガラスを認識できるか確認してみた。
北陽電気さんのTop-URGで窓ガラスを計測した。
窓のカーテンを閉めた状態の写真と計測結果の可視化画像
窓のカーテンを開けた状態の写真と計測結果の可視化画像
以上の実験からは測域センサーのレーザーはガラスを透過することが分かった。
完全に透過しないのは汚れのせいかもしれない。
うちの研究室では今年から誘われて
2関節筋をやってます。
2関節筋というのは関節2個にまたがった筋肉のことで
人間や動物にふつうについてるものです。
1個(一対といったほうがよいかも)の筋肉で2個の関節を制御するということで
面白そうでしょ?!
この2関節筋がわれわれの腕や足の制御を容易にしていると考えられてます。
今地味にアーム機構にばねを取り付けて2関節筋を装備した筋骨格系が外力にたいしてどのように働くのか、下のほうに紹介した本に書いてあることを追試しようとしているのですが
まあ、1年ぽっきりの学生にやってもらうのには少しばかり退屈です。
やはりうちの研究室の特徴は大会を目指しがんがん技術を上げようというのが
いいのですが、「腕ロボットコンテストとかないかなあ?」
と探しているところです。
5年前ぐらいにアメリカで腕相撲ロボットの大会があったようですが
日本で似たようなものはないでしょうか?
何か目標になるものを掲げたやりたいのですが、いかがですか皆さん!?
この動画はその最先端みたいなロボです
私どもがバイブルにしている本
最近、私のところに届いたメールの情報で面白かった
ビリヤードするロボットです。
玉の予想軌跡をシミュレーションして、行動方針を
決めるところが未来な感じがしますね。
つくばチャレンジだけではないかもしれませんが
つくばちゃれんじのような屋外実験では、実験データのリアルタイムでの
見える化は非常に大事です。
ぼくが以前やってたミサイルの発射試験でもペンレコが発射とともに
だーーーーーーてなかんじでデータの見える化をやっておりました。(今はやってないかも)
故に前々からGUIアプリによって走行軌跡を表示したり、LRS(レーザーレンジスキャナ)の
スキャンを可視化したりといったことの重要性をひしひしと感じながら
学生のせいにして、結局毎年間に合わないと言った状況に陥っておりました。
今年は少し気合いを入れるつもりでおります。
ここ最近、GDI+でちまちま行くかと思いましたが、y軸が下向いてるのを自分で修正するライブラリ作ったりするのが面倒になってきて、もともと検討していたOpenGLに戻しました。
OpenGLのラッパークラスとして昨年はTAOFrameworkを試していたのですが、最近本家のWebに接続できないので、OpenTKに乗り換えることにしました。
この記事はOpenTKを使えるようにするまで、付属の英語のマニュアルのチュートリアルを参考にした手順を備忘録がわりに記載したものです。
●OpenTK入手&インストール
http://www.opentk.com/
ここからダウンロードしてインストールしてください。
●VisualStudio2008での使用方法
1 新規作成でWindowsFormアプリケーションのプロジェクトを作ってください。
2 ツール→ツールボックスのアイテム選択
3 出てきたダイアルログからGLControlにチェックを入れる。(フィルタにTKと入れると楽)
4 OKを押してダイアログを閉じます。
5 すべてのWindowsFormにGLControlの歯車のようなアイコンができているので、それをFormにドラッグアンドドロップで配置します。
6 Form1.csを以下のように編集します。(マニュアルには、ここまでにもう少し記述が、あります。かなり省略してます。)プロジェクト名を「OpenTK_test100619」で作成しましたので。namespaceが「OpenTK_test100619」になってますが。皆さんのプロジェクト名で適宜変えてください。
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Windows.Forms;
using OpenTK.Graphics; //追加
using OpenTK.Graphics.OpenGL; //追加
namespace OpenTK_test100619 //名前空間名は適宜変えてください
{
public partial class Form1 : Form
{
bool loaded = false;//追加したメンバー
public Form1()
{
InitializeComponent();
}
//以下はOpenGLコントロールを使用できるようにするために追加したコードです
private void glControl1_Load(object sender, EventArgs e)
{
loaded = true;
glControl1.MakeCurrent(); //GLコントロールを複数使うときはこれでカレントを指定します
GL.ClearColor(Color.AliceBlue); // Yey! .NET Colors can be used directly!
SetupViewport();
}
private void glControl1_Paint(object sender, PaintEventArgs e)
{
if (!loaded) // Play nice
return;
glControl1.MakeCurrent(); ////GLコントロールを複数使うときはこれでカレントを指定します
GL.Clear(ClearBufferMask.ColorBufferBit | ClearBufferMask.DepthBufferBit);
GL.MatrixMode(MatrixMode.Modelview);
GL.LoadIdentity();
GL.Color3(Color.Yellow);
GL.Begin(BeginMode.Triangles);
GL.Vertex2(10, 20);
GL.Vertex2(100, 20);
GL.Vertex2(100, 50);
GL.End();
glControl1.SwapBuffers();
}
private void SetupViewport()
{
int w = glControl1.Width;
int h = glControl1.Height;
GL.MatrixMode(MatrixMode.Projection);
GL.LoadIdentity();
GL.Ortho(0, 200, 0, 200, -1, 1); // Bottom-left corner pixel has coordinate (0, 0)
GL.Viewport(0, 0, w, h); // Use all of the glControl painting area
}
}
}
7 このままビルドしてもうまくいかないので、GLcontorolをクリックしてプロパティにいって「電撃マーク」をクリックし、paintイベントやLoadイベントにソースコードのイベントハンドラメソッドを結びつけます。(これがわからんで最初悩みました)
8 後はビルドして実行するだけです。OpenGLの文法に沿った描画はこのサンプルでは、paintハンドラに書かれてますが、これを参考に後はOpenGLを勉強しましょう。(私も勉強します。)
9 本家マニュアルにはこのあとアニメーションさせる方法とかチュートリアルが続いています。またやる気になれば続きを書くかもしれません。
以上
今日は余っている、キャベツ、玉ねぎ、にんじん、豚小間
それにセロリと牛筋を買ってきて牛筋のトマト煮
それぞれの食材を適当に切り、水を入れてホールトマト一缶をぶち込んで
コンソメを数個いれて煮るだけです。
うまいですよ。
本日の授業は有効数字の取り扱い
学生に自学自習用の資料や環境を整えて
課題を付与して、自分達で協力して
資料等で調べながら問題を解決していくスタイル
今日は問題量が多すぎて
時間内に終わらない学生が続出してしまった
また、有効数字の問題は計算だけなら中学生でも
できてしまうので、最終的な有効数字の桁数など
どうしてそうなるのか解らない学生が続出した。
また、配った資料を読み解けない可能性もあり。
最初の講義時間を多く取る必要性もある。
これからは難易度も飛躍的に上がっていき
問題の量と、難易度のバランスを考え直さなければならない
また、1人づつ、答え合わせをするスタイルを
考え直さないと3時間の授業ではあるが
消化しきれない感がある。
昨日買ってきたWebカメラを台車に付けて撮影してみました。
一秒ごとに静止画を取り込んでます。
台車は揺れていますが、どんなところを走っていたかを識別する
目的なら十分ですね。
つくばのロボに載せて、走行中の画像を自動取得するためにWebカメラを買ってきてみた。
¥1500ぐらいです。この価格で出始めのデジカメより性能いいのです。
欲をだして画像処理に走ると、迷走しそうなので、今年は取り込むだけだと思います。
Webに落ちてたC#のサンプルプログラムで取り込んでみたところ。
はやぶさの帰還映像です。
ビーコンも受信できたみたいで回収もできそうです
カプセルの中に何か入っていればいいのですが
テレビでは中継がなかったみたいですが残念ですねえ
日本の快挙だというのになあ
読売新聞のいい写真です
http://www.yomiuri.co.jp/zoom/20100613-OYT9I00808.htm
Twitter情報の、はやぶさが最後に取った写真
http://twitpic.com/1wh78q/full
はやぶさご帰還記念
ちゃんちゃん焼きと、この前も作ってましたが豚汁
キャベツ、玉ねぎ、人参、ジャガイモ
野菜定番品目をドーンと買ってきて、この二品を作ったです。
なにか独りキャンプな感じのメニューですが
男の独り料理なのですぐ作れるこんなメニューばっかりです。
でもうまい!
これ書きながら食べながら、飲みながらですが汗だくです。
今日はこのままはやぶさの中継を飲みながら見るぞー!
さて、実際に座標変換がうまくいっているのかを検証します。
測量データをGoogleMapでプロット
学校の中庭に辺の長さが3m4m5mの直角三角形を描きます。
各頂点をGPSで3分間測量した緯度経度のデータの平均値を点の緯度経度として使います。
10進緯度経度をGoogleMapにプロットすると下の様になります。
また、この図は上がGoogleEarth下がGoogleMapでの表示です。Mapのほうが真実に近いような気がします。写真や地図の貼り方がEarthとMapでは違うことによる差異かなと解釈しています。
さてMapのほうを信じると、GPS測量の緯度経度は実際に直角三角形を良くあらわしていると思います。ちなみに現地でコンパス計測したところ4mの辺が大体磁北に一致してるようです。
変換プログラムの結果をエクセルで表示
C#で作成した座標変換プログラムの結果をエクセルに取り込んで散布図グラフで表示してみたのが下の図です。うまくいっている感じがします。
GPSから得られるGPGGAセンテンスの緯度経度情報は度分60進法表記で表されています。
また独特のフォーマットなので多少の変換が必要です
GPGGAの緯度経度フォーマット
緯度経度のデータの標記 dddmm.mmmm
といった形式です。桁数は受信機によって違うかもしれません。
小数点から前に数えて3文字目以上の数字が「度」をあらわし2文字目から後が小数点を含めて「分」です。
この表記は60進法なので、分の部分を60で割り算をして度に変換し、度の部分に足してやると10進数で緯度経度を単位を度で表したことになります。変換の流れをC#プログラム風に書くと
double a = 3631.9737;//aにGPSの緯度経度データを代入
int x = (int)(a / 100);//度の成分をxに取りだす。
a = ( a / 100 - (double)x ) *100 / 60;//分を度に変換
a = (double)x + a;//度成分を足して変換終了
うえの流れは変数の型の考えを取り入れているので数学的にはちんぷんかんぷんかもしれません。小数のある実数を整数型の変数(ここではx)にいれると整数部分だけが残ります。
また(int)という表現はキャストと言って(int)の後にある演算結果を整数型に変換するという意味です。()の中に必要な型を入れることによって任意の型変換を実施できます。
ちなみにintは整数型、doubleは実数型です。
さて、玉ねぎ2個目をどうさばこうかと悩んだ挙句
いつものメニュー豚丼とあいなりました。
今日は事前に日本酒を3合ほどいただきほろ酔い気分で
どんぶり飯をいただきました。
作り方は
豚バラ肉をフライパンに投入、玉ねぎ一個を適当に切り
フライパンに投下
して、しばらく炒めたのちに
日本酒をすこしばかりふりかけ
水をいれ煮立ってきたら調味料を投入
調味料は今回はめんつゆ、さとう、みりんのブレンドです
あとは、ふたを閉めて弱火で3分ばかり煮て
最後に溶き玉子でとじて任務完了です。
どんぶりに炊きたてのご飯をもり、そこにお玉ですくった
この豚丼の具をおしみなくもる。
得も言われぬ、芳香が漂ってきます。
すぐにかっ込みたい気分を少し抑え、豚丼と別に作ってあった
味噌汁を抱えて、わが食卓移動
さて、待ちに待った瞬間がやってまいりました
箸をいれ、一気に口の中にかき込みます
豚肉のプロプリッとした歯ごたえに、すこしサクッとした感じが残る
玉ねぎ、豚肉のうまみが口に広がると少し遅れて玉ねぎの甘みが
広がってきます。
よだれがじゅわーーーーと出てきます
うまーーーー
ということで今日は終わりです。
次は何をつくろうか・・・・
GPSの座標変換について
GPSはアンテナと衛星までの距離を測るセンサーです。
4つ以上の衛星とアンテナ間の距離を測ることによりアンテナの3次元的な位置を割り出します。
NMEA0183のGPGGAセンテンスでは緯度、経度、高さ、ジオイド高等が得られます。(ジオイド高をどうやって得ているのかは今のところ解りません)
移動ロボットの姿勢(位置と向いている方向を含めて姿勢と言っています。)に関しては、緯度経度ではだいぶ使いにくいので、直交座標系で話ができると楽です。
そこで緯度経度から地球中心の直交座標へ変換して更に、地表のある点を原点として、地面が平面だと近似した地平座標に変換してやります。
ECEF座標へ
地球の中心を原点としたデカルト座標をECEF(Earth Center Earth Fixed)座標と言います。変換式はプログラム言語風に書くと以下の様になります。
Lat:緯度
Lon:経度
High:海抜高度(標高)
N:ジオイド高
PI:円周率
Xe,Ye,Ze:ECEF座標
f = 1 / 298.257223563;
a = 6378137;
e = Sqrt(f * (2 - f));
R = a / Sqrt(1 - e*e * Sin(Lat * PI / 180) * Sin(Lat * PI /180));
Xe = (R + High + N) * Cos(Lat * PI / 180) * Cos(Lon * PI / 180);
Ye = (R + High + N) * Cos(Lat * PI / 180) * Sin(Lon * PI / 180);
Ze = (R * (1 - e*e) + High + N) * Sin(Lat * PI / 180);
ENU座標(地平座標)へ
地平座標をENU座標と言います。Eは東西の東のEast、Nは南北の北のNorth、UはアップダウンのUpを表します。緯度経度からENUへはECEFに変換したものもつかいます。またENUでは地球平面上の何処が原点なのかあらかじめ決めておきECEFで保持しておかなければなりません。以下に変換式をプログラム言語風に書くと以下の様になります。
Xe,Ye,Ze:位置を変換したい点のECEF座標
x0,y0,z0:地平座標の原点としたい点のECEF座標
Lat,Lon:位置を変換したい点の緯度経度
E = -Sin(Lon * PI / 180) * (Xe - x0) + Cos(Lon * PI / 180) * (Ye - y0);
N = -Sin(Lat * PI / 180) * Cos(Lon * PI / 180) * (Xe - x0) - Sin(Lat * PI / 180) * Sin(Lon * PI / 180) * (Ye - y0) + Cos(Lat * PI / 180) * (Ze - z0);
U = Cos(Lat * PI / 180) * Cos(Lon * PI / 180) * (Xe - x0) + Cos(Lat) * Sin(Lon * PI / 180) * (Ye - y0) + Sin(Lat * PI / 180) * (Ze - z0);
参考文献:http://www.enri.go.jp/~fks442/K_MUSEN/
キャベツは今日で終了です。
本日のレシピはあきおSの奥方の推薦レシピでした。
キャベツの千切りと玉ねぎのスライスを塩もみして
ツナ缶を入れてマヨネーズであえました。
うまー\(^o^)/
結論をいえば
キャベツ1個ぐらいはなくそうと思えばわけないということ
そして1週間ぐらいは全然平気に食べられるということです。
もう一周できる違うレシピが欲しいところです
実験としてはもう少し長く使ってどこまで食べられるか
確かめればよかったですね。
そして、このレシピを作るために玉ねぎを4個も買ってきてしまい
この次からは玉ねぎ編です。
玉ねぎもよいレシピ募集してます!
忘れないように
GPGGAセンテンスは$GPGGAからはじまり次の順で並んでいる
UTC時刻 hhmmss
緯度 ddmm.mmm
北か南か N or S
経度 dddmm.mmm
東か西か E or W
状態 0:ダメ 1:単独測位 2:DGPS
衛星数
HDOP 水平精度の良しあし
海抜高度 ジオイドからの高さと理解している
海抜高度の単位 m
ジオイド高
ジオイド高の単位
エイジ DGPS補正データの古さ
DGPS基準局ID
*
チェックサムサム $の次の文字から*直前までの文字までの排他論理和
てな感じですがいつも海抜高度と
ジオイド高との関係が解らなくなって困ります。
地球を楕円体とみなした時の理想的な楕円体から
ジオイド面までの距離がジオイド高で
ジオイド面からアンテナまでの距離が
海抜高度と理解しています。
だからこれらの値を足すと楕円体からの高さである
楕円体高になると考えてます。
間違っていたら教えてください。
排他論理和とはXORどちらか片方が真の時だけ
真になる論理演算。
ORとの違いはORは両方真の時は真だけれど、XORはその場合偽。
ちなみにチェックサムはコンマも入るんだろうか?
ここのところロボコンの締め切りなどがあり
帰りが遅く、キャベツ料理をする暇がなかった
5日前の火曜日に買ったキャベツはまだ元気です。
今日はまだ残っていた、豚バラ肉を鍋でごま油で
炒めて、キャベツをいれしんなりするまで炒め
ネギとニンニクを投入してトン汁風の味噌汁を
こさえました。
中々おいしいです。明日の朝にも食べられそうです。
私が入門者みたいなものですが備忘録と若干でも皆さんのお役に立ればと、ロボットの誘導について、ぼちぼち書かせていただきますのでよろしくお願いします。まずはこれからという方たちに参考になればと思います。
いろいろやってみようと思っても
今日は忙しく家に帰りついたのは10時過ぎ
でも、今日は昨日予告したものを作りました。
バラ肉のスライスを炒め、千切り状のキャベツ4分の1個分
を炒め、しんなりしてきたら溶き玉子2個分をいれた
お好み焼き風のおかずです。
しかし、キャベツ4分の1個分は少し多かったかも。
寝る前にこんなに食っていいのだろうか?
●一人暮らしの食の悩み
全国の一人暮らしの独身男女の皆様
日々の食事にいろいろ悩みますよね。
開き直って、3食外食
自炊に挑戦したけれど3日坊主
買った食材があまり冷蔵庫の中で新種の生物に変化・・・
でも、外食が多くなると出費も半端じゃないので
やはり自炊が安上がりです。
また、塩分過多、野菜不足や揚げ物が多くなるのが
外食の特徴でアラフォー世代は健康管理にも
気を使わなければならないので毎日外食は困りものです。
●昼はスーパー惣菜系のり弁当
ここ一カ月以上、昼飯は弁当を作って持って行くようになりました
まだ続いているので自分的にもがんばってるなあ思います。
ただ、行きつけだった定食屋さんにたまには行きたいので
最近つけ始めた家計簿で出費の動向がわかったら、月に何回かは
行きたいと思います。
弁当の中身はスーパーの200円ぐらいのきんぴらとかひじきなどの惣菜を3種類ぐらい
買い置きしておき、それを弁当に詰めます。
コメは夜寝る前に研いでタイマーセットで朝炊きあがるようにしておきます。
で、弁当箱にコメを詰めますがこのときはのり弁にします。
のりは奮発してお寿司屋さんで使ってる田庄の5つ星です。
実験によるとスーパーの総菜は7日はお腹を壊さないで食べられます。
日にちをずらして違う種類を買っておくと毎日違う組み合わせを楽しめます。
●夕ご飯:豆腐の味噌汁が今後の課題
夕ご飯は、納豆、味噌汁、惣菜が基本メニューです。弁当用の惣菜の流用です。
味噌汁は出し入りの味噌をスプーンですくって、食べるお椀で熱湯で溶いて増えるわかめと
刻んだネギを入れて出来上がり。奮発するときはあおさ海苔を入れます。
最近、豆腐を入れられないかと思いますが、味噌汁一杯分の豆腐は
そんなに使わないので余って腐らせないか心配なので今後研究してみたいと思います。
●朝ごはん
朝ごはんはスーパーでかったヤマザキのランチパックと牛乳が基本になってます
●食費
総菜は3種類で600円ぐらいです。それを昼夜たべても3日間は食べられるので
1日200円で済んでる計算になります。10kgのコメを日割り計算したり、味噌代とか
考えると一日の食費はもう少しかかります。
当初、一日1300円の予算計画でしたが、いざやり始めるとだいぶ圧縮できそうな気配です。
●自分で作る
材料を悪くしたり手間を考えると惣菜大作戦はいいのですが、やはり自分で作ったほうが
食べたいものが食べられるしおいしくも感じます。
しかし、食材を余らせて腐らせるのが嫌なので二の足を踏むことが多いのではないでしょうか。
●キャベツ大作戦
そこで、今回、キャベツで実験を試みています。
キャベツ1個を買ってきて、きっちり使い切るまでにどのくらいかかるか
なるべく毎日違うレシピにしてどんなものが作れるのかを実践します。
とりあえずキャベツ一個と豚バラスライス250gを買ってきました。
一日目の今日は自分の定番である、冷しゃぶです。
キャベツ4分の1を千切りにして、ゆでた豚バラ肉を上に載せて
ノンオイル青じそドレッシングをかけて出来上がり。
まあ、料理というほどのものではありません。
明日は、同じく豚バラとキャベツを炒めて玉子でとじていただく予定です。
3日目はまだ決まらずです。何かアドバイスがあったらお願いします。



 シンプルなアプローチ
シンプルなアプローチ